

Как можно регулировать обороты асинхронного двигателя: обзор способов
Как можно регулировать обороты асинхронного двигателя: обзор способов
Благодаря надежности и простоте конструкции асинхронные двигатели (АД) получили широкое распространение. В большинстве станков, промышленном и бытовом оборудовании применяются электродвигатели такого типа. Изменение скорости вращения АД производится механически (дополнительной нагрузкой на валу, балластом, передаточными механизмами, редукторами и т.д.) или электрическими способами. Электрическое регулирование более сложное, но и гораздо более удобное и универсальное.

Для многих агрегатов применяется именно электрическое управление. Оно обеспечивает точное и плавное регулирование пуска и работы двигателя. Электрическое управление производится за счет:
- изменения частоты тока;
- силы тока;
- уровня напряжения.
В этой статье мы рассмотрим популярные способы, как может осуществляться регулировка оборотов асинхронного двигателя на 220 и 380В.
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
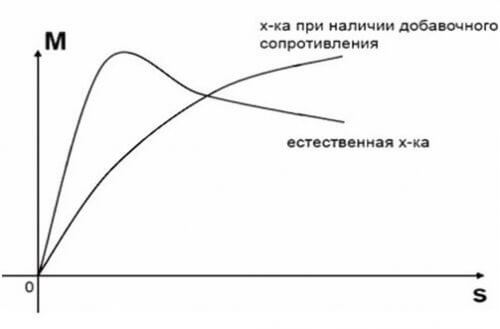
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.

Достоинствами данного метода являются:
- плавное регулирование;
- изменение скорости вращения ротора в большую и меньшую сторону;
- жесткие механические характеристики;
- экономичность.
Недостаток один — необходимость в частотном преобразователе, т.е. увеличение стоимости механизма. К слову, на современном рынке представлены модели с однофазным и трёхфазным входом, стоимость которых при мощности 2-3 кВт лежит в диапазоне 100-150 долларов, что не слишком дорого для полноценной регулировки привода станков в частной мастерской.
Переключение числа пар полюсов
Данный метод применяется для многоскоростных двигателей со сложной обмоткой, позволяющей изменять число пар ее полюсов. Самое широкое применение получили двухскоростные, трехскоростные и четырехскоростные АД. Принцип регулировки проще всего рассмотреть на основе двухскоростного АД. В такой машине обмотка каждой фазы состоит из двух полуобмоток. Скорость вращения изменяется при подключении их последовательно или параллельно.

В четырехскоростном электродвигателе обмотка выполнена в виде двух независимых друг от друга частей. При изменении числа пар полюсов первой обмотки производится изменение скорости работы электромотора с 3000 до 1500 оборотов в минуту. При помощи второй обмотки производится регулировка вращения 1000 и 500 оборотов в минуту.
При изменении числа пар полюсов происходит и изменение критического момента. Для его сохранения неизменным, требуется одновременно с изменением числа пар полюсов регулировать и питающее напряжение, например, переключением схемы звезда-треугольник и их вариациями.
Достоинства данного метода:
- жесткие механические характеристики двигателя;
- высокий КПД.
- ступенчатая регулировка;
- большой вес и габаритные размеры;
- высокая стоимость электромотора.
Способы управления скоростью АД с фазным ротором
Изменение скорости вращения АД с фазным ротором производится путем изменения скольжения. Рассмотрим основные варианты и способы.
Изменение питающего напряжения
Этот способ также применяется для АД с КЗ ротором. Асинхронный двигатель подключается через автотрансформатор или ЛАТР. Если уменьшать напряжение питания, частота вращения двигателя снизится.

Но такой режим уменьшает перегрузочную способность двигателя. Этот способ применяется для регулирования в пределах напряжения не выше номинального, так как увеличение номинального напряжения приведет к выходу электродвигателя из строя.
Активное сопротивление в цепи ротора
При использовании данного метода в цепь ротора подключается реостат или набор постоянных резисторов большой мощности. Данное устройство предназначено для плавного увеличения сопротивления.
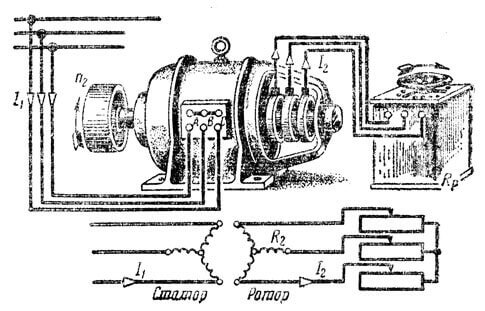
Скольжение растет пропорционально увеличению сопротивления, а скорость вращения вала электромотора при этом снижается.
- большой диапазон регулирования в сторону понижения скорости вращения.
- снижение КПД;
- увеличение потерь;
- ухудшение механических характеристик.
Асинхронный вентильный каскад и машины двойного питания
Изменение скорости работы асинхронных электромоторов в данных случаях выполняется путем изменения скольжения. При этом скорость вращения электромагнитного поля неизменна. Напряжение подается напрямую на обмотки статора. Регулировка происходит за счет использования мощности скольжения, которая трансформируется в цепь ротора, и образует добавочную ЭДС. Такие методы используются только в специальных машинах и крупных промышленных устройствах.

Плавный пуск асинхронных электродвигателей
АД кроме безусловных преимуществ, обладают существенными недостатками. Это рывок на старте и большие пусковые токи, в 7 раз превышающие номинальные. Для мягкого старта электродвигателя используются следующие методы:
- переключение обмоток по схеме звезда – треугольник;
- включение электродвигателя через автотрансформатор;
- использование специализированных устройств для плавного пуска.
В большинстве частотных регуляторов есть функция плавного пуска двигателя. Это не только снижает пусковые токи, но и уменьшает нагрузки на исполнительные механизмы. Поэтому регулирование частоты и плавный пуск довольно сильно связаны между собой.
Как сделать устройство для изменения скорости вращения электродвигателя своими руками
Для регулировки маломощных однофазных АД можно использовать диммеры. Однако этот способ ненадежен и обладает серьезными недостатками: снижением КПД, серьезным перегревом устройства и опасностью повреждения двигателя.
Для надежного и качественного регулирования оборотов электродвигателей на 220В, лучше всего подходит частотное регулирование.
Приведенная ниже схема позволяет собрать частотное устройство для регулировки электромоторов мощностью до 500 Вт. Изменение скорости вращения производится в границах от 1000 до 4000 оборотов в минуту.
Устройство состоит из задающего генератора с изменяемой частотой, состоящего из мультивибратора, собранного на микросхеме К561ЛА7, счетчика на микросхеме К561ИЕ8, полумоста регулятора. Выходной трансформатор Т1 выполняет развязку верхнего и нижнего транзисторов полумоста.

Демпфирующая цепь С4, R7 гасит всплески напряжения опасные для силовых транзисторов VT3, VT4. Выпрямитель, удвоитель напряжения питающей сети, включает в себя диодный мост VD9, с конденсатором фильтра на которых происходит удвоение напряжения питания полумоста.
Напряжение первичной обмотки: 2х12В, вторичной обмотки 12В. Первичная обмотка трансформатора управления ключами, состоит из 120 витков медного провода сечением 0,7мм, с отводом от середины. Вторичная – две обмотки, каждая по 60 витков повода сечением 0,7 мм.
Вторичные обмотки необходимо максимально надежно заизолировать друг от друга, так как разница потенциалов между ними доходит до 640 В. Подключение выходных обмоток к затворам ключей производится в противофазе.
Вот мы и рассмотрели способы регулировки оборотов асинхронных двигателей. Если возникли вопросы, задавайте их в комментариях под статьей!
Реализация управления пуском, остановом, реверсом и скоростью вращения ПЧ Elhart EMD-Mini с внешних кнопок / переключателей
1. Способы подачи сигналов управления на частотный преобразователь
Преобразователь частоты ELHART EMD-Mini имеет встроенную несъемную панель управления. С этой панели доступен весь функционал частотника (настройки, управление). По умолчанию частотный преобразователь настроен на управление двигателем со встроенной панели (кнопка RUN/STOP, встроенный потенциометр). Потенциометр настроен на регулировку частоты от 0 до 50 Гц (максимальной частоты).
 Рисунок 1 — Преобразователи частоты ELHART EMD-MINI
Рисунок 1 — Преобразователи частоты ELHART EMD-MINI
Управление частотным инвертором со встроенной панели имеет свои недостатки:
- Так как преобразователь предназначен для установки в шкаф управления, то для доступа к встроенной панели необходимо каждый раз открывать дверь шкафа (в случае работы в пыльном производстве — мука, пыль, цемент — частое открытие двери недопустимо). Кроме того, часто частотник устанавливается рядом с двигателем, а пульт оператора находится в стороне.
ПЧ ELHART позволяет настроить подачу команд управления со встроенной панели, интерфейса RS-485, а так же на программируемых дискретных входах, в этом материале речь пойдет именно о них.
Указания по монтажу сигналов управления к частотному преобразователю:
- Управляющий кабель должен быть размещен отдельно от кабелей силовой части.
- Применяйте для подключения к дискретным входам только высококачественные коммутационные элементы, исключающие дребезг контактов.
- Для предотвращения помех используйте экранированные провода с сечением 0,75 мм².
- Не подавайте внешнее напряжение на клеммы управляющих сигналов.
- Максимальная длина управляющих цепей 30 м.
В частотном инверторе EMD-MINI есть 4 программируемых дискретных входа FWD, REV, S1 и S2. Принципиальных отличий между входами нет, так как функции настроек для всех входов даны одинаковы. Для управления с дискретных входов необходимо использовать переключатели типа «сухой контакт» (кнопка, концевик, релейный выход). Если источник управления встроенная панель — пуск, останов, смена направления движения с дискретных входов невозможна. Если источник управления дискретные входы, пуск со встроенной панели невозможен.
Кнопку «Стоп» на панели частотника можно заблокировать (Р103=0 — кнопка заблокирована, Р103=1 — кнопка активна). По умолчанию кнопка активна. Возможно подключение кнопок управления по двухпроводной и трехпроводной схеме.
2. Двухпроводная схема подключения ЧП с использованием контактов с фиксацией
Режим 1
| Состояние входных сигналов | Режим работы | |
|---|---|---|
| К1 | К2 | |
| Вкл | Выкл | Вращение в прямом направлении |
| Выкл | Вкл | Вращение в обратном направлении |
| Выкл | Выкл | Стоп |
| Вкл | Вкл | Стоп |
- Р102=1 — Источник команд управления = программируемые дискретные входы;
- Р315=6 — Вход FWD = вращение в прямом направлении;
- Р316=7 — Вход REV = вращение в обратном направлении.
В схеме можно применить переключатель «Джойстик» EMAS CP101DJ20 на 2 направления с фиксацией. (2НО). Среднее положение — стоп, или переключатель с фиксацией II-0-I EMAS B101S30
Режим 2
| Состояние входных сигналов | Режим работы | |
|---|---|---|
| К1 | К2 | |
| Вкл | Выкл | Вращение в прямом направлении |
| Вкл | Вкл | Вращение в обратном направлении |
| Выкл | Выкл | Стоп |
| Выкл | Вкл | Стоп |
- Р102=1 — Источник команд управления = программируемые дискретные входы;
- Р315=6 — Вход FWD = вращение в прямом направлении;
- Р316=4 — Вход REV = изменение направления вращения.
В этой схеме пока замкнут контакт К1 двигатель вращается. Если К2 разомкнут — вращение происходит в прямом направлении, если К2 замкнут — в обратном. В схеме можно применить 2 переключателя с фиксацией 0-I, например, переключатель B100S20, B100C, или тумблер МА111.
3. Трехпроводная схема подключения ЧП с использованием контактов без фиксации
Режим 1
- Р102=1 — Источник команд управления = программируемые дискретные входы;
- Р315=8 — Вход FWD = сигнал «Стоп» (контакт НЗ);
- Р317=6 — Вход S1 = вращение в прямом направлении;
- Р318=7 — Вход S2 = вращение в обратном направлении.
В схеме могут быть применены 2 кнопки без фиксации B100DH для запуска вращения и кнопка красная с НЗ контактом, например, кнопка B200DK для остановки.
Также для запуска можно применить переключатель без фиксации II-0-I B101S32 или переключатель «Джойстик» CP101DJ21 на 2 направления без фиксации. Переключение влево — вращение в одну сторону, вправо — в другую.
Режим 2
- Р102=1 — Источник команд управления = программируемые дискретные входы;
- Р315=8 — Вход FWD = сигнал «Стоп» (контакт НЗ);
- Р317=5 — Вход S1 = команда «Пуск» (НО);
- Р318=4 — Вход S2 = изменение направления вращения (кнопка НО с фиксацией).
В схеме может быть применена сдвоенная кнопка пуск/стоп EMAS B102K20KY. Где НЗ
контакт К3 — «Стоп», НО контакт К1 — «Пуск», НО контакт К2 — «Реверс» (переключатель с фиксацией, например, B100S20).
Контакт К2 не запускает двигатель, а лишь меняет направление вращения (в замкнутом состоянии). Параметр Р104 позволяет запретить реверс (по умолчанию разрешен).
Преобразователь частоты имеет возможность производить автостарт после подачи питания. Для этого необходимо в параметре Р416 установить 1 (автостарт разрешен). Также необходимо обеспечить постоянную подачу сигнала «ПУСК». Установить P102=1, то есть источником сигнала «ПУСК» будет дискретный вход и использовать кнопку с фиксацией для подачи сигнала на дискретный вход. Дискретный вход, на который будет подан сигнал «ПУСК», должен иметь функцию «5» либо «6» (см. P315-P318). Для автоматического запуска частотный преобразователь должен быть полностью выключен (при кратковременном пропадании питания ПЧ выдаст ошибку «Lu3» и не запустится).
Преобразователь частоты имеет возможность защиты от изменения параметров неквалифицированным персоналом. Если P118 =1, то все параметры заблокированы, параметры не могут быть изменены за исключением P100 (предустановленная выходная частота).
4. Задание частоты
Задание частоты возможно со встроенного потенциометра, внешними кнопками (больше/меньше), внешним потенциометром, сигналами 0-10 В, 4-20 мА, кнопками (больше/меньше) со встроенной панели, через интерфейс RS-485. Для использования внешнего потенциометра необходимо в качестве источника задания выходной частоты выбрать аналоговый сигнал 0..10 В (Р101=1). Внешний потенциометр для частотных преобразователей используется номиналом 5 либо 10 кОм. Рекомендуется использовать потенциометр EMAS BPR05K или BPR10K.
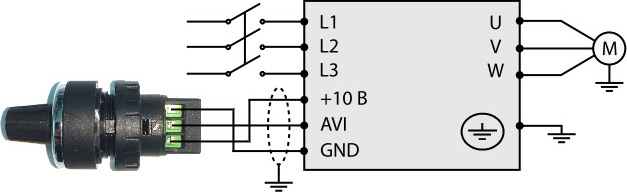 Рисунок 4 — Задание частоты сигналом 0. 10 В внешним потенциометром
Рисунок 4 — Задание частоты сигналом 0. 10 В внешним потенциометром
Подключая внешний потенциометр мы подаем на аналоговый вход сигнал от 0 до 10 В (потенциометр выступает в роли делителя напряжения). Если используется не весь диапазон частот (от 0 до Fmax), то можно настроить частоту при минимальном и максимальном сигнале потенциометра. Пример настройки на управление частотой в диапазоне 20-45 Гц (см. рис. 5).
Рисунок 5 — График задания частоты
- Р310=20 (частота при минимальном сигнале);
- Р312=45 (частота при максимальном сигнале).
Также можно настроить на работу с прямым и обратным вращением двигателя. Пример настройки вращения от 25 Гц в одном направлении до 40 Гц в другом. При положении ручки потенциометра 0% двигатель вращается в обратном направлении на частоте 25 Гц. Пропорционально вращению ручки потенциометра двигатель замедляется, останавливается и начинает вращаться в прямом направлении. При положении ручки 100% достигается частота 40 Гц с вращением в прямом направлении (см. рис. 6).
Рисунок 6 — График задания частоты
- Р310=25 (частота при минимальном сигнале);
- Р311=1 (направление вращения при минимальном сигнале = обратное);
- Р312=40 (частота при максимальном сигнале);
- Р314=1 (при аналоговом сигнале реверс разрешен).
Задание частоты встроенными кнопками «Вверх/Вниз» (предустановленная выходная частота)
Фиксированная частота используется в качестве задания выходной частоты, когда параметр P101=0. Во время работы ПЧ выходную частоту можно изменять кнопками «Вверх/Вниз» (расположенными на встроенной панели управления). После отключения питания значение частоты вернётся на значение в параметре P100, если P812=1. После отключения питания значение частоты заданной кнопками «Вверх/Вниз» сохраняется, если P812=0 (задано по умолчанию).
Задание частоты командами «Больше/Меньше»
Выходная частота задаётся сигналами «Вверх/Вниз», подключенными к программируемым дискретным входам (см. рис 7).
Рисунок 7 — Задание частоты через дискретные входы (команды «Больше/Меньше»)
Для конфигурации входов, необходимо изменить параметры:
- Р101=4 — источник задания выходной частоты = внешние кнопки «Вверх/Вниз»;
- P317=15 — вход S1 запрограммирован на сигнал «Вверх», то есть увеличение заданной частоты;
- P318=16 — вход S2 запрограммирован на сигнал «Вниз», то есть уменьшение заданной частоты.
При замыкании контакта «Вверх» происходит увеличение заданной частоты, при замыкании контакта «Вниз» происходит уменьшение заданной частоты. Для сохранения заданной частоты после отключения питания необходимо установить соответствующий параметр P812=0 (установлен по умолчанию) (см. рис. 8).
Рисунок 8 — Задание частоты командами «Больше/Меньше»
Выносной пульт EMD-Mini RCP имеет абсолютно те же функции и возможности, что и панель управления на самом частотнике.
 Пульт ELHART EMD-Mini RCP
Пульт ELHART EMD-Mini RCP
При подключении пульта EMD-Mini RCP показания на встроенной панели и внешнем пульте дублируются (отображаются синхронно). При этом кнопки и потенциометр на встроенной панели не активны. Управление и настройки происходят только с внешнего пульта.
Пульт ELHART EMD-Mini P318=16 — вход S2 запрограммирован на сигнал «Вниз», то есть уменьшение заданной частоты
- не требует затрат
- полный функционал
- индикация параметров
- для доступа необходимо открывать шкаф (где установлен частотный преобразователь)
- нет защиты от неквалифицированного персонала (по умолчанию)
- полный функционал
- индикация параметров
- дистанционное управление
- ограничение длины 2 м
- нет защиты от неквалифицированного персонала (по умолчанию)
- расстояние от преобразователя до пульта управления до 30 м
- защита от неквалифицированно персонала
- ограниченный функционал
- нет индикации параметров (частоты)
5. Устранение типовых неполадок в работе частотного преобразователя
Если причины возникновения неполадки не известны, то рекомендуется произвести сброс параметров на заводские значения Р117=8 и провести настройку преобразователя частоты еще раз.
Что такое регулятор оборотов двигателя (ESC) и на что обращать внимание при выборе
При покупке готовой RC-модели в полной комплектации вопрос о выборе регулятора скорости неактуален. Совсем другое дело, когда модель собирается «с нуля» или нужно заменить пришедшую в негодность комплектующую.
ESC (англ. «Electronic Speed Control») – это составляющая любой радиоуправляемой модели на электротяге. Регулятор оборотов (или «регулятор скорости», или «контроллер», он же в простонародье «регуль») отвечает за плавное, без лишних скачков управление двигателем.

Немного теории
Регулятор скорости – это передаточное звено между установленным аккумулятором и электродвигателем. И нужно отметить, что последний без него долго не протянет.
Электродвигатель плюс регулятор оборотов – это силовая установка модели, ее сердце и движущая сила.
Параметры ESC нужно учитывать при выборе аккумулятора, то есть четко следовать инструкции к модели. И да, от параметров регулятора зависит выбор типа АКБ и ее напряжение.
Регулятор скорости может относиться к категории «специализированных», но может быть и универсальным, то есть перепрограммироваться (настраиваться) на разную RC-технику – автомодели, судомодели или авиамодели.
Кстати, если имеем модель с задним ходом, то на ней установлен регулятор с реверсом. Такой контроллер меняет направление вращения электромотора, пуская на него напряжение противоположной полярности.
Как выбрать регулятор скорости
Выбор контроллера зависит от установленного двигателя и аккумулятора.
Первое, на что обратить внимание – максимальный рабочий ток регулятора. Проверьте характеристики АКБ – от номинального напряжения на акуме зависит и выбор контроллера. Если на модели установлена батарея с напряжением 4S , то и рабочее напряжение регулятора должно быть не ниже. Ни в коем случае нельзя к 4S аккумулятору подключать контроллер, с параметрами рабочего тока 2-3S – он просто сгорит.
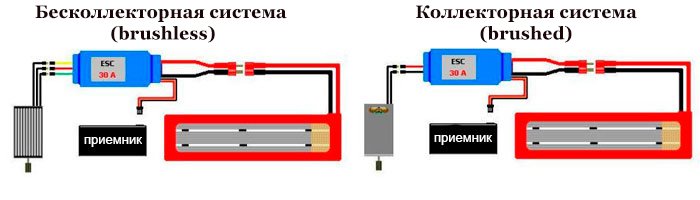
Электродвигатели подразделяются на коллекторные (brushed) и бесколлекторные (brushless). Для каждого типа предназначены свои регуляторы оборотов, которые отличаются принципом работы и даже схемой.
Сразу отметим, что контроллеры для двигателей бесколлекторного типа предназначены только для одного мотора, в то время как регуляторы для бесщеточных электродвигателей (они, кстати, значительно дешевле) могут работать с несколькими движками.
Чтобы оценить выбранный регулятор оборотов, пройдитесь по следующим параметрам:

Напряжение
Номинальное покажет, при каком токе ESC сможет проработать длительное время (длительное, в понимании электроники – это несколько секунд, а не часов).
Пиковое напряжение – это характеристика для оценки максимальной нагрузки на контроллер в определенный момент (запуск, быстрый старт, резкое торможение).
Рабочее напряжение мы уже упоминали – это параметр для определения совместимости с АКБ.
Сопротивление
Внутреннее сопротивление играет важную роль для профессиональных моделистов. За счет разных схем переключения электрических соединений, происходит высвобождение энергии, иными словами – установка греется и энергия теряется. Внутреннее сопротивление регулятора у спортивных моделей невелико (около 0,0006 Ом), но даже эти потери могут сыграть решающую роль на серьезных соревнованиях.
У регуляторов с реверсом внутреннее сопротивление обычно выше, поэтому спортивные модели и не имеют заднего хода. Так что, если вы настроены серьезно на победу в гонках, то учитесь сразу обходиться без реверса, хоть без заднего хода поначалу и неудобно.
Настройка
Современные регуляторы оборотов поддаются настройке. Некоторые можно настроить прямо с пульта радиоуправления, на других есть кнопки на корпусе. Как вариант — вхождение в режим настройки при подключении или съеме джампера (перемычки). В роли индикатора настройки выступает свето- или звукоиндикация.
Подбирая регулятор оборотов для своей модели, внимательно изучите в инструкции ее характеристики и рекомендации по подбору комплектующих. Ну, а если возникают вопросы – лучше все-таки посоветоваться со специалистом.
Управление несколькими двигателями одним преобразователем частот
Развитие производства привело к созданию сложных индустриальных аппаратов с большим количеством исполнительных механизмов, приводимых в движение одним, либо группой электродвигателей.
Для обеспечения независимого управления оборудованием следует найти оптимальное решение для таких задач, как обеспечение синхронного пуска и останова, поддержание необходимого соотношения крутящихся моментов и т.д. Значимым элементом автоматизации для получения хороших результатов является использование преобразователей частоты для управления электродвигателями .
Способ совместного управления несколькими электродвигателями одним преобразователем частоты, согласно суждению специалистов, стал неактуальным, однако в то же время он достаточно экономичен. Единственный недостаток такой системы: принудительное ограничение перечня возможностей преобразователя частоты и прекращение работы в случае выхода из строя одного из электродвигателей.
Использование частотных преобразователей имеет неоспоримые преимущества:
- обеспечение плавного запуска;
- стабильное поддержание заданных параметров процесса;
- значительная экономия энергии (переменный расход);
- упрощение технологических схем.
Подбор подходящей модели преобразователя частоты диктуется условиями и параметрами конкретной задачи. Для реализации совместного управления необходимо использование моторных дросселей, включение тепловых реле и термодатчиков для защиты от перегрева, преимущественно потребуются дополнительные настройки преобразователя частоты в зависимости от параметров и количества используемых двигателей.
Для корректной работы блока управления стоит учесть типы подключения двух и более электродвигателей к одному частотнику:
1. Параллельное присоединение. Для данного подключения двух двигателей к одному частотному преобразователю (мощность электродвигателей одинакова, возможно жесткое механическое соединение валов) потребуется оборудование, работающее в скалярном режиме с мощностью, превышающей суммарную мощность электродвигателей.
При параллельном подключении к частотнику асинхронных двигателей разной мощности справедливо все вышесказанное, однако требования к его защите ужесточаются. Для этого устанавливается тепловое реле, поскольку настройками преобразователя частоты защитить оборудование с меньшей мощностью не удастся. Важно, чтобы номинальные напряжения и количество полюсов электродвигателей совпадали.
Схема параллельного подключения электродвигателей:
2. Поочередное подключение двух и более электродвигателей к одному частотнику. При использовании преобразователя частоты для поочередного управления несколькими приводами необходимо:
- Предусмотреть блокировку переключения при работающем электродвигателе. Все коммутации должны выполняться, когда преобразователь частоты находится в режим «останов».
- Реализовать защитное отключение преобразователя частоты до отключения контакторов или переключателей при пропадании напряжения в выходной цепи.

Схема поочередного подключения двигателей:
Компания «РусАвтоматизация» представляет свою подборку универсальных преобразователей частоты, подходящих для регулирования синхронных и асинхронных двигателей.
Скалярно-векторный.
Векторное с/без обратной связи.
ECO-режим
Определиться со способом управления и подобрать подходящую модель частотного преобразователя следует исходя из конкретно поставленной задачи. Лучше всего обратиться за помощью к квалифицированным специалистам компании « РусАвтоматизация » , опыт которых позволит решить эту проблему самым оптимальным образом.
В интернет-магазине «РусАвтоматизации» доступны преобразователи частоты различных производителей с широким спектром технических характеристик и возможностей применения.

 | Хотите сохранить эту статью? Скачайте её в формате PDF |  | Остались вопросы? Обсудите эту статью на нашей странице В Контакте |  | Хочешь читать статьи первым, подписывайся на наш канал в Яндекс.Дзен |
Рекомендуем прочитать также:

Влияние частотных преобразователей на качество эксплуатации оборудования

Пять самых распространенных вопросов при выборе преобразователя частоты

Частотный электропривод. Эффективность применения частотно-регулируемых приводов

