

Частотный регулятор для асинхронного двигателя – устройство и принцип работы
Частотный регулятор для асинхронного двигателя – устройство и принцип работы

Электродвигатели
Есть в электроустановках позиции, когда без электродвигателя, работающего на постоянном токе, не обойтись. Именно этот электромотор можно регулировать по скорости вращения ротора, что и требуется в электроустановках. Правда, у него масса недостатков, и одни из них – это быстрый износ щеток, если их установка была проведена с искривлением, да и срок их эксплуатации достаточно низок. При износе происходит искрение, поэтому такой движок во взрывоопасных и запыленных помещениях использовать нельзя. Плюс ко всему электродвигатель постоянного тока стоит дорого. Чтобы изменить данную ситуацию, используют асинхронный двигатель и частотный регулятор для асинхронного двигателя.

Практически по всем показателям электродвигатели, работающие на переменном токе, превосходят аналоги на постоянном. Во-первых, они надежнее. Во-вторых, имеют меньшие габариты и вес. В-третьих, цена ниже. В-четвертых, они проще в эксплуатации и подключении.
А вот недостаток у них один – это сложность регулирования частоты вращения. В данном случае стандартные способы регулирования частоты асинхронных двигателей здесь не подойдут, а именно – изменения напряжения, установка сопротивления и так далее. Частотное управление асинхронным электрическим двигателем – была проблема номер один. Хотя теоретическая база известна аж с тридцатых годов прошлого столетия. Все дело упиралось в дороговизну частотного преобразователя. Все изменилось, когда изобрели микросхемы, с помощью которых через транзисторы стало возможным собрать преобразователь частоты с минимальной себестоимостью.
Принцип регулирования
Итак, способ регулирования частоты вращения асинхронного двигателя основано на одной формуле. Вот она внизу.
- ω – угловая скорость вращения статора;
- f – частота входного напряжения;
- p – количество полюсных пар.

То есть, получается так, что изменить скорость вращения электродвигателя можно лишь путем изменения частоты напряжения. Что это дает на практике? Первое – это плавность работы мотора, особенно это будет чувствовать при пуске оборудования, когда сам двигатель работает под самыми высокими нагрузками. Второе – повышенное скольжение. За счет этого растет КПД, и снижаются потери мощностных характеристик.
Структура частотного регулятора
Все современные преобразователи частоты построены на принципе так называемого двойного преобразования. То есть, переменный ток преобразуется в постоянный через неуправляемый выпрямитель и фильтр. Далее, через импульсный инвертор (он трехфазный) происходит обратное преобразование тока постоянного в ток переменный. Инвертор сам состоит из шести силовых ключей (транзисторных). Так вот каждая обмотка электрического движка подключается к определенным ключам выпрямителя (положительному или отрицательному). Именно инвертор изменяет частоту напряжения, которое прикладывается к статорным обмоткам. По сути, именно через него происходит частотное регулирования электродвигателя.

В этом приборе на выходе устанавливаются силовые транзисторы. Они выполняют роль ключей. Если сравнивать их с тиристорами, то необходимо отметить, что первые вырабатывают сигнал в виде синусоиды. Именно данная форма создает минимальные искажения.
Принцип работы
Теперь сам принцип работы частотного преобразователя. Чтобы понять это, предлагаем разобрать рисунок ниже.

Принцип работы
Итак, пройдемся по рисунку, где
- «В» — это неуправляемый силовой выпрямитель диодного типа.
- «АИН» — автономный инвертор.
- «СУИ ШИМ» — система широтно-импульсного управления.
- «САР» — система автоматического регулирования.
- «Св» — конденсатор фильтра.
- «Lв» — дроссель.
По схеме очень хорошо видно, что инвертор регулирует частоту напряжения за счет системы широтно-импульсного управления (оно высокочастотное). Именно эта часть регулятора отвечает за подключение обмоток статора электродвигателя попеременно то к положительному полюсу выпрямителя, то к отрицательному. Периодичность подключения к полюсам происходит по синусоидальной кривой. При этом частота импульсов определяется именно частотой ШИМ. Так и происходит частотное регулирование.

Заключение по теме
Как видите, данный способ регулирования частоты вращения асинхронного двигателя достаточно прост. Но и не только. Он позволяет уйти от ненадежных двигателей постоянного тока, перейти на более надежные виды электрического оборудования. К тому же структура прибора, основанная на современных методах преобразования электрического тока, сделала его дешевым и доступным. Плюс ко всему простота устройства дает возможность собрать частотники своими руками.
UX-52 – Китайский регулятор оборотов. Обзор, тестирование, доработка.

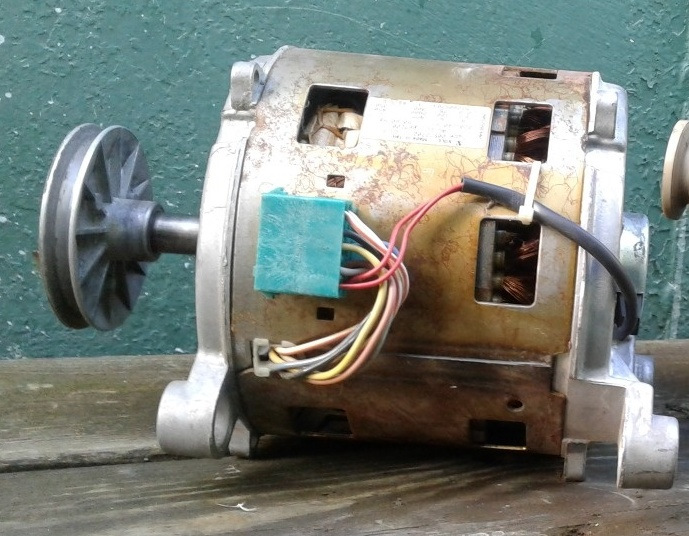
Выписал данный регулятр с Али для своего коллекторного двигателя от стиральной машины (510 W при 15000 об/мин):

По возможности полностью попытался разобраться с этим девайсом. По обзору в интернете народ в основном себе выписывает и использует вот такой регулятор:

Мой отличается от них не только ценой (мой 1004 руб. против 697 руб. в апреле 2019 г. на Али с бесплатной доставкой) но и наличием встроенного электронного тахометра с цифровым дисплеем. Внимательно изучив эту железяку пришел к выводу, что она предназначена изначально для регулировки оборотов асинхронного двигателя о чем и свидетельствует схема подключения на корпусе.
До сих пор я не сталкивался с тем, что регулировать обороты асинхронного двигателя можно не только частотником но и в принципе вот таким регулятором. С трудом нашел в интернете фото асинхронного движка с таходатчиком и видео, где человек подключает асинхронный электродвигатель с немыслимыми для меня и асинхронного электродвигателя 17500 об/мин. и таходатчиком на нем. yandex.ru/video/search?fi…%8C&noreask=1&path=wizard
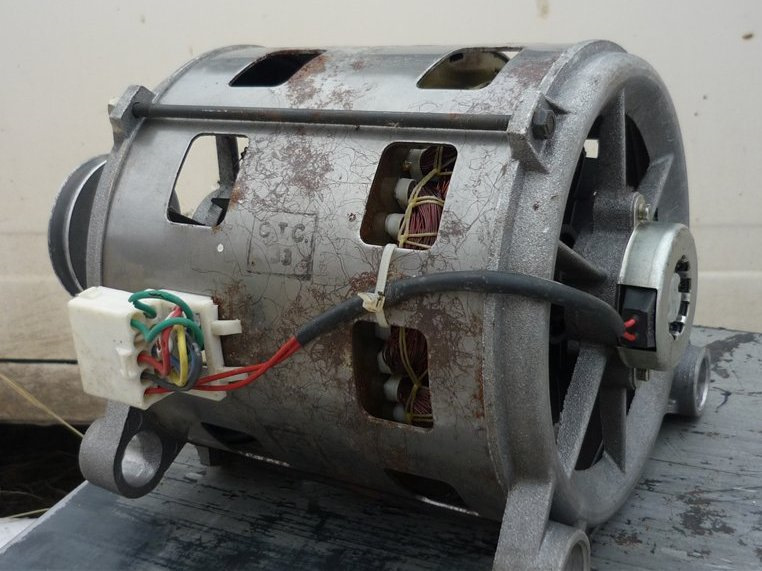
Видимо для таких специальных электродвигателей к стиральным машинам изначально и был изготовлен регулятор UX-52. Потому как на мой взгляд нельзя регулировать обороты у классического асинхронного электродвигателя напряжением без последствий для него. Ну а для коллекторного регулировка этим UX-52 да и US-52 будет в самый раз.
Так как в наличии у меня такого движка нет провел опыт с подобным движком но без таходатчика.
Работает зараза, но даже с небольшим напряжением на входе двигатель набирает свои обороты, мощность при этом маленькая – можно остановить за шкив.
Уверенность в том что регулятор предназначен для асинхронных электродвигателей укрепилась также и в том, что встроенный конденсатор 12Мкф 470V как раз и нужен только для работы асинхронника. Да и схема подключения на самом регуляторе нарисована для работы асинхронного электродвигателя.
Встроенный тахометр рассчитан на максимальное число оборотов 5000, если поднимаешь выше то несет ерунду. Произвел замеры разных параметров данного регулятора при помощи моего коллекторного электродвигателя на холостом ходу и под нагрузкой – прижимал шкив дощечкой товодя потребляемый ток до 3А. Замерял обороты этим механическим прибором (погрешность 1%) и я ему верю:

Выводы: не стоит переплачивать за UX-52 так как встроенный цифровой тахометр показывает примерно в 1,5 раза меньше реальных оборотов. Вполне сойдет и US-52 без этой приблуды. Результаты испытаний и схемы:
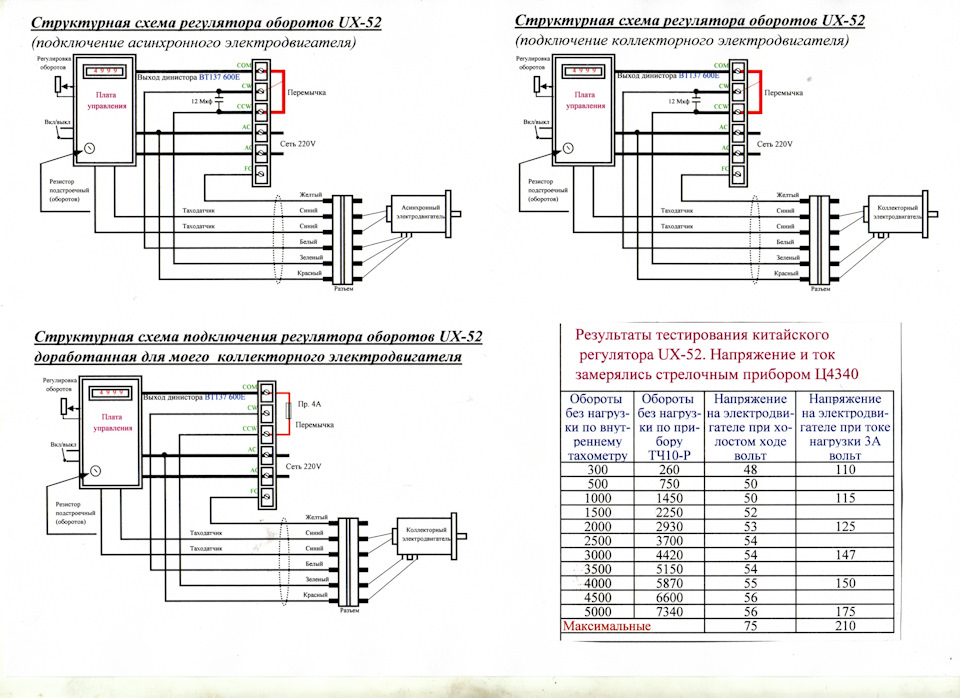
Теперь о переделке регулятора для своего электродвигателя. Установленный в данном регуляторе динистор ВТ137 600Е на 8 ампер на явно маловатый радиатор долго не протянет и я выбросив громоздкий конденсатор на 12 Мкф изготовил самопальный радиатор и через пасту КПТ-8 закрепил на его месте на пластиковых стойках – корпус данного динистора с сетью не развязан.
Принцип работы асинхронного двигателя
 Февраль 20th, 2013
Февраль 20th, 2013  Рубрика: Электродвигатели, Электрооборудование
Рубрика: Электродвигатели, Электрооборудование

Здравствуйте, уважаемые посетители сайта http://zametkielectrika.ru.
Электрические машины переменного тока нашли широкое распространение, как в сфере промышленности (шаровые мельницы, дробилки, вентиляторы, компрессоры), так и в домашних условиях (сверлильный и наждачный станки, циркулярная пила).
Основная их часть является бесколлекторными машинами, которые в свою очередь разделяются на асинхронные и синхронные.
Асинхронные и синхронные электрические машины обладают одним замечательным свойством под названием обратимость, т.е. они могут работать как в двигательном режиме, так и в генераторном.
Но чтобы дальше перейти к более подробному их рассмотрению и изучению, необходимо знать принцип их работы. Поэтому в сегодняшней статье я расскажу Вам про принцип работы асинхронного двигателя. После прочтения данного материала Вы узнаете про электромагнитные процессы, протекающие в электродвигателях.
Принцип работы трехфазного асинхронного двигателя
С устройством асинхронного двигателя мы уже знакомились, поэтому повторяться второй раз не будем. Кому интересно, то переходите по ссылочке и читайте.
При подключении асинхронного двигателя в сеть необходимо его обмотки соединить звездой или треугольником. Если вдруг на выводах в клеммнике отсутствует маркировка, то необходимо самостоятельно определить начала и концы обмоток электродвигателя.
При включении обмоток статора асинхронного двигателя в сеть трехфазного переменного напряжения образуется вращающееся магнитное поле статора, которое имеет частоту вращения n1. Частота его вращения определяется по следующей формуле:

- f — частота питающей сети, Гц
- р — число пар полюсов
Это вращающееся магнитное поле статора пронизывает, как обмотку статора, так и обмотку ротора, и индуцирует (наводит) в них ЭДС (Е1 и Е2). В обмотке статора наводится ЭДС самоиндукции (Е1), которая направлена навстречу приложенному напряжению сети и ограничивает величину тока в обмотке статора.
Как Вы уже знаете, обмотка ротора замкнута накоротко, у электродвигателей с короткозамкнутым ротором, или через сопротивление, у электродвигателей с фазным ротором, поэтому под действием ЭДС ротора (Е2) в ней появляется ток. Так вот взаимодействие индуцируемого тока в обмотке ротора с вращающимся магнитным полем статора создает электромагнитную силу Fэм.
Направление электромагнитной силы Fэм можно легко найти по правилу левой руки.
Правило левой руки для определения направления электромагнитной силы
На рисунке ниже показан принцип работы асинхронного двигателя. Полюса вращающегося магнитного поля статора в определенный период обозначены N1 и S1. Эти полюса в нашем случае вращаются против часовой стрелки. И в другой момент времени они будут находится в другом пространственном положении. Т.е. мы как бы зафиксировали (остановили) время и видим следующую картину.

Токи в обмотках статора и ротора изображены в виде крестиков и точек. Поясню. Если стоит крестик, то значит ток в этой обмотке направлен от нас. И наоборот, если точка, то ток в этой обмотке направлен к нам. Пунктирными линиями показаны силовые магнитные линии вращающегося магнитного поля статора.
Устанавливаем ладонь руки так, чтобы силовые магнитные линии входили в нашу ладонь. Вытянутые 4 пальца нужно направить вдоль направления тока в обмотке. Отведенный большой палец покажет нам направление электромагнитной силы Fэм для конкретного проводника с током.
На рисунке показаны только две силы Fэм, которые создаются от проводников ротора с током, направленным от нас (крестик) и к нам (точка). И как мы видим, электромагнитные силы Fэм пытаются повернуть ротор в сторону вращения вращающегося магнитного поля статора.
Поясняющий рисунок для определения электромагнитной силы Fэм для проводника с током, который направлен от нас (крестик).

Поясняющий рисунок для определения электромагнитной силы Fэм для проводника с током, который направлен к нам (точка).

Совокупность этих электромагнитных сил от каждого проводника с током создает общий электромагнитный момент М, который приводит во вращение вал электродвигателя с частотой n.
Отсюда и произошло название асинхронный двигатель. Частота вращения ротора n всегда меньше частоты вращающегося магнитного поля статора n1, т.е. отстает от нее. Для определения величины отставания введен термин «скольжение», который определяется по следующей формуле:

Выразим из этой формулы частоту вращения ротора:

Пример расчета частоты вращения двигателя
Например, у меня есть двигатель типа АИР71А4У2 мощностью 0,55 (кВт):
- число пар полюсов у него равно 4 (2р=4, р=2)
- частота вращения ротора составляет 1360 (об/мин)

Определим частоту вращения поля статора этого двигателя при частоте питающей сети 50 (Гц):

Найдем величину скольжения для этого двигателя:

Кстати, направление движения вращающегося магнитного поля статора, а следовательно, и направление вращения вала электродвигателя, можно изменить. Для этого необходимо поменять местами любые два вывода источника питающего трехфазного напряжения. Об этом я упоминал Вам в статьях про реверс электродвигателя и чередование фаз.
Принцип работы асинхронного двигателя. Выводы
Зная принцип работы асинхронного двигателя, можно сделать вывод, что электрическая энергия преобразуется в механическую энергию вращения вала электродвигателя.
Частота вращения магнитного поля статора, а следовательно и ротора, напрямую зависит от числа пар полюсов и частоты питающей сети. Если число пар полюсов ограничивается типом двигателя (р = 1, 2, 3 и 4), то частоту питающей сети можно изменить в большем диапазоне, например, с помощью частотного преобразователя.
Если в нашем примере частоту питающей сети увеличить всего на 10 (Гц), то частота вращения магнитного поля статора увеличится на 300 (об/мин).
Опыт по установке и монтажу частотных преобразователей у меня есть, но не большой. Несколько лет назад на городском водоканале мы проводили замену двух высоковольтных двигателей насосов холодной воды на низковольтные двигатели с частотными преобразователями. Но это уже отдельная тема для разговора. Сейчас покажу Вам несколько фотографий.
Вот фотография старого высоковольтного двигателя напряжением 6 (кВ).

А это новые двигатели напряжением 400 (В), установленные вместо старых высоковольтных.

Вот шкафы частотных преобразователей. На каждый двигатель свой шкаф. К сожалению, изнутри сфотографировать не успел.

Подписывайтесь на рассылку новостей с моего сайта, чтобы не пропустить самое интересное. В ближайшее время я расскажу Вам про пуск и способы регулирования частоты вращения трехфазных асинхронных двигателей двигателей, схемы их подключения и многое другое.
Регулирование скорости асинхронного двигателя
 Долгое время в промышленности использовались нерегулируемые электроприводы на базе АД, но, в последнее время возникла надобность в регулировании скорости асинхронных двигателей.
Долгое время в промышленности использовались нерегулируемые электроприводы на базе АД, но, в последнее время возникла надобность в регулировании скорости асинхронных двигателей.
Частота вращения ротора равна
При этом, синхронная частота вращения зависит от частоты напряжения и числа пар полюсов

Исходя из этого, можно сделать вывод, что регулировать скорость АД можно с помощью изменения скольжения, частоты и числа пар полюсов.
Рассмотрим основные способы регулировки.
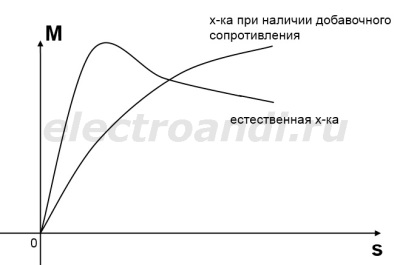
Регулирование скорости с помощью изменения активного сопротивления в цепи ротора
Этот способ регулирования скорости применим в двигателях с фазным ротором. При этом в цепь обмотки ротора включается реостат, которым можно плавно увеличивать сопротивление. С увеличением сопротивления, скольжение двигателя растёт, а скорость падает. Таким образом, обеспечивается регулировка скорости вниз от естественной характеристики.
Недостатком данного способа является его неэкономичность, так как при увеличении скольжения, потери в цепи ротора растут, следовательно, КПД двигателя падает. Плюс к этому, механическая характеристика двигателя становится более пологой и мягкой, из-за чего небольшое изменение момента нагрузки на валу, вызывает большое изменение частоты вращения.
Регулирование скорости данным способом не эффективно, но, несмотря на это применяется в двигателях с фазным ротором.
Регулирование скорости двигателя с помощью изменения напряжения питания
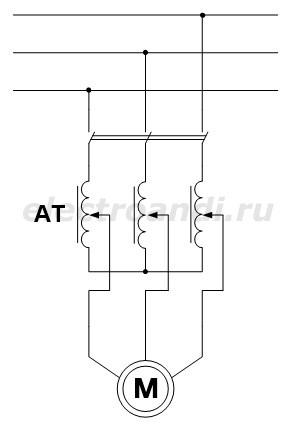
Данный способ регулирования можно осуществить, если включить в цепь автотрансформатор, перед статором, после питающих проводов. При этом, если снижать напряжение на выходе автотрансформатора, то двигатель будет работать на пониженном напряжении. Это приведёт к снижению частоты вращения двигателя, при постоянном моменте нагрузки, а также к снижению перегрузочной способности двигателя. Это связано с тем, что при уменьшении напряжения питания, максимальный момент двигателя уменьшается в квадрат раз. Кроме того, этот момент уменьшается быстрее, чем ток в цепи ротора, а значит, растут и потери, с последующим нагревом двигателя.
Способ регулирования изменением напряжения, возможен только вниз от естественной характеристики, так как увеличивать напряжение выше номинального нельзя, потому что это может привести к большим потерям в двигателе, перегреву и выходу его из строя.
Кроме автотрансформатора, можно использовать тиристорный регулятор напряжения.
Регулирование скорости с помощью изменения частоты питания
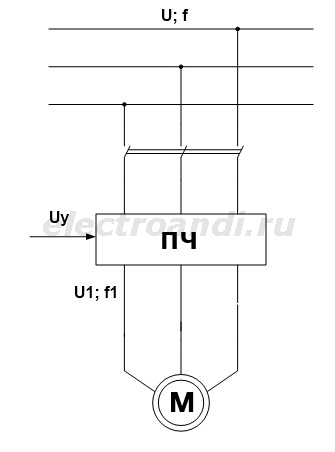
При данном способе регулирования, к двигателю подключается преобразователь частоты (ПЧ). Чаще всего это тиристорный преобразователь частоты. Регулирование скорости осуществляется изменением частоты напряжения f, так как она в данном случае влияет на синхронную скорость вращения двигателя.
При снижении частоты напряжения, перегрузочная способность двигателя будет падать, чтобы этого не допустить, требуется повысить величину напряжения U1. Значение на которое нужно повысить, зависит от того какой привод. Если регулирование производится с постоянным моментом нагрузки на валу, то напряжение нужно изменять пропорционально изменению частоты (при снижении скорости). При увеличении скорости этого делать не следует, напряжение должно оставаться на номинальном значении, иначе это может причинить вред двигателю.
Если регулирование скорости производится с постоянной мощностью двигателя (например, в металлорежущих станках), то изменение напряжения U1 необходимо производить пропорционально квадратному корню изменения частоты f1.
При регулировании установок с вентиляторной характеристикой, необходимо изменять подводимое напряжение U1 пропорционально квадрату изменения частоты f1.
Регулирование с помощью изменения частоты, является наиболее приемлемым вариантом для асинхронных двигателей, так как при нем обеспечивается регулирование скорости в широком диапазоне, без значительных потерь и снижения перегрузочных способностей двигателя.
Регулирование скорости АД изменением числа пар полюсов
Такой способ регулирования возможен только в многоскоростных асинхронных двигателях с короткозамкнутым ротором, так как число полюсов этого ротора, всегда равно количеству полюсов статора.
В соответствии с формулой, которая рассматривалась выше, скорость двигателя можно регулировать изменением числа пар полюсов. Причём, изменение скорости происходит ступенчато, так как количество полюсов принимают только определённые значения – 1,2,3,4,5.
Изменение количества полюсов достигается переключением катушечных групп статорной обмотки. При этом катушки соединяются различными схемами соединения, например “звезда — звезда” или “звезда – двойная звезда”. Первая схема соединения даёт изменение количества полюсов в соотношении 2:1. При этом обеспечивается постоянная мощность двигателя при переключении. Вторая схема изменяет количество полюсов в таком же соотношении, но при этом обеспечивает постоянный момент двигателя.
Применение данного способа регулирования оправдано сохранением КПД и коэффициента мощности при переключении. Минусом же является более сложная и увеличенная конструкция двигателя, а также увеличение его стоимости.

